Lecture 12 : Interrupts, Timers and Tasks in Embedded System
怎么感觉 Block 4 是四个 Block 里最简单的……
这下 MS 要挂科了。
——写了 Mock Exam 有感
任务(Task)
介绍
在嵌入式程序中,程序经常需要进行不同的活动,我们称这些活动为任务(Task)。这些任务往往可以分为两类:
- 通过事件触发的任务(Event-Triggered Task)
- 当外部事件发生时,程序对其做出反应
- 间隔时间并不固定或者有规律
- 通过时间触发的任务(Time-Triggered Task)
- 周期性发生的任务,通过 MCU 上的计时器进行控制
当一个程序具有多个任务需要处理时,需要决定哪个任务优先执行。这个顺序由任务的优先级(Priority)决定
轮询(Polling)和中断(Interrupts)
当响应通过外部事件触发的任务时,有这么几种做法可以选择:
- 对设备进行轮询
- 使用中断来在触发时响应
- 同时使用两者
轮询(Polling)
轮询(Polling)指的是 CPU 持续不断地确认一个设备的状态来判断是否需要响应和处理,也可以选择按顺序不断确认多个设备的状态
两次确认之间的间隔称为轮询周期(Polling Cycle),轮询周期会受到多个因素影响
但是,轮询也存在一些问题:
- 在进行轮询时,CPU 不能进行其他的操作或者响应
- 所有的输入都被一视同仁的对待,不能优先处理更紧迫的任务
- (在大多数情况下,对 CPU 的占用更高)
中断(Interrupt)
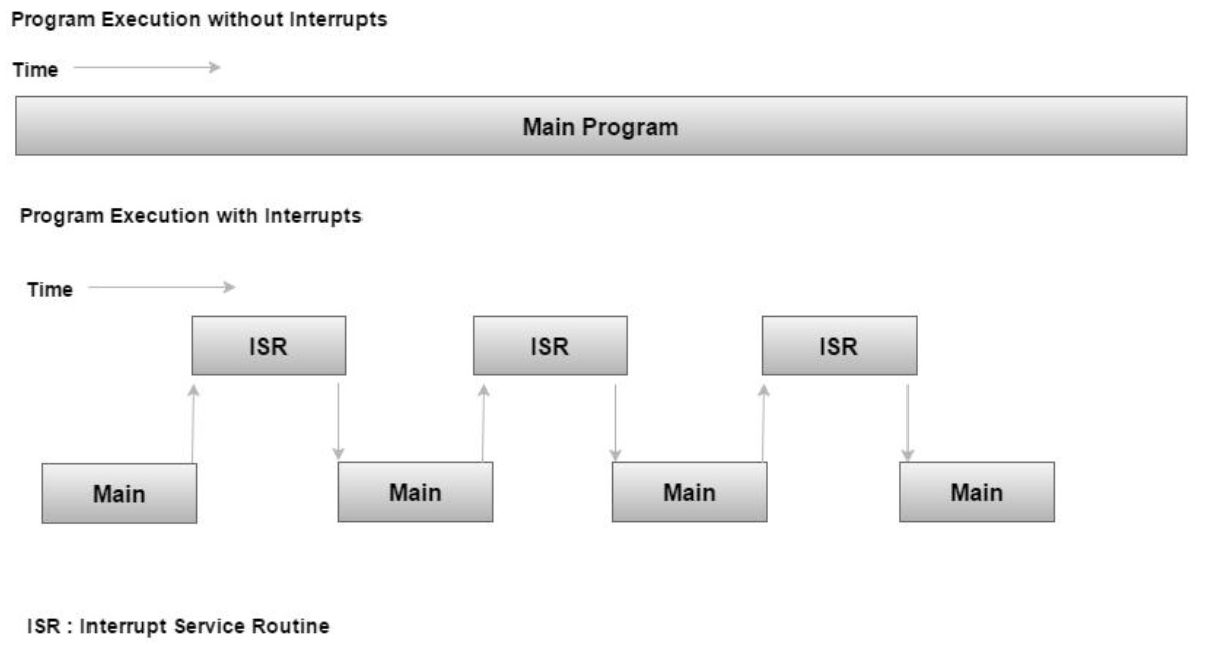
中断(Interrupt),指的是一种可以让程序暂停运行的方式,CPU 可以中途打断程序运行并处理别的事件的响应,当事件处理完成后 CPU 继续执行之前暂停执行的程序。
一般来讲,中断是比轮询更好的解决方案。
中断分为硬件中断(Hardware/External Interrupt)和软件中断(Software/Internal Interrupt)
- 硬件中断
- 由于外部事件产生的中断‘
- 比如,如果你配置了 InterruptIn 类并连接了一个按钮,按钮造成的上升沿或者下降沿就时一个外部触发源
- 有很多外设都可以产生中断,比如 ADC,UART,TIM 等
- 软件中断
- 软件中断是响应软件指令而产生的,如一些异常情况(Exceptional Condition)或者指令集中会产生中断的指令而发生的。
- 比如说进行将数据除以 0 的运算时,程序会产生除以零异常(divide-by-zero exception),程序会根据这个异常进行对应的处理,比如打印报错信息。
- 不妨想想之前 IP 课里 用 gdb 调试时经常爆出来的数组越界
中断服务程序(ISR, Interrupt Service Routine)
当一个中断事件发生时,对应的中断服务程序(ISR, 也可以写作 Interrupt Handler)会被调用,期间普通的程序将被暂停。
多个中断同时发生时,会按照中断优先级来进行处理。
对于每个中断,会用 4 个字节(也就是 32 位,因为 stm32 是 32 位架构)存储中断服务程序的函数地址。程序会通过调用对应地址的函数来调用 ISR 进行处理。
MCU 处理中断的步骤
- 停止现在进行的操作,在栈里存储下一个指令的地址(即 Program Counter 里的东西)
- 程序会先阻塞低优先级的中断,优先处理高优先级的中断
- 读取中断向量表(Interrupt Vector Table),获得 ISR 的地址,跳转至 ISR 里进行处理
- ISR 处理完后返回原来的位置继续进行程序
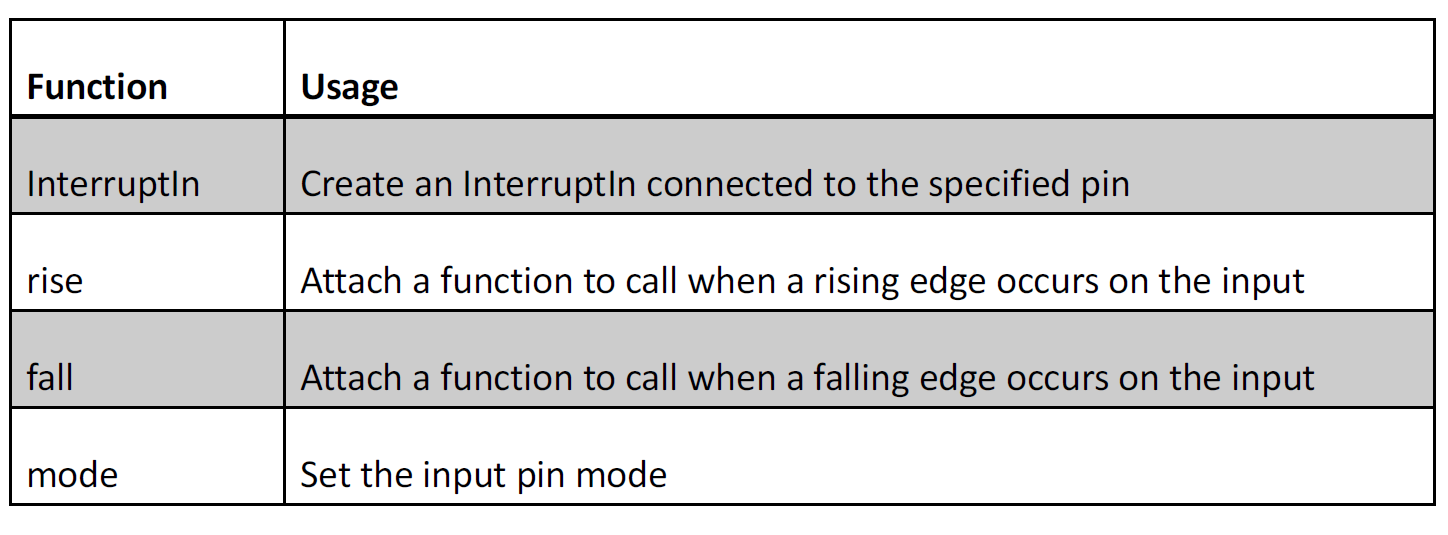
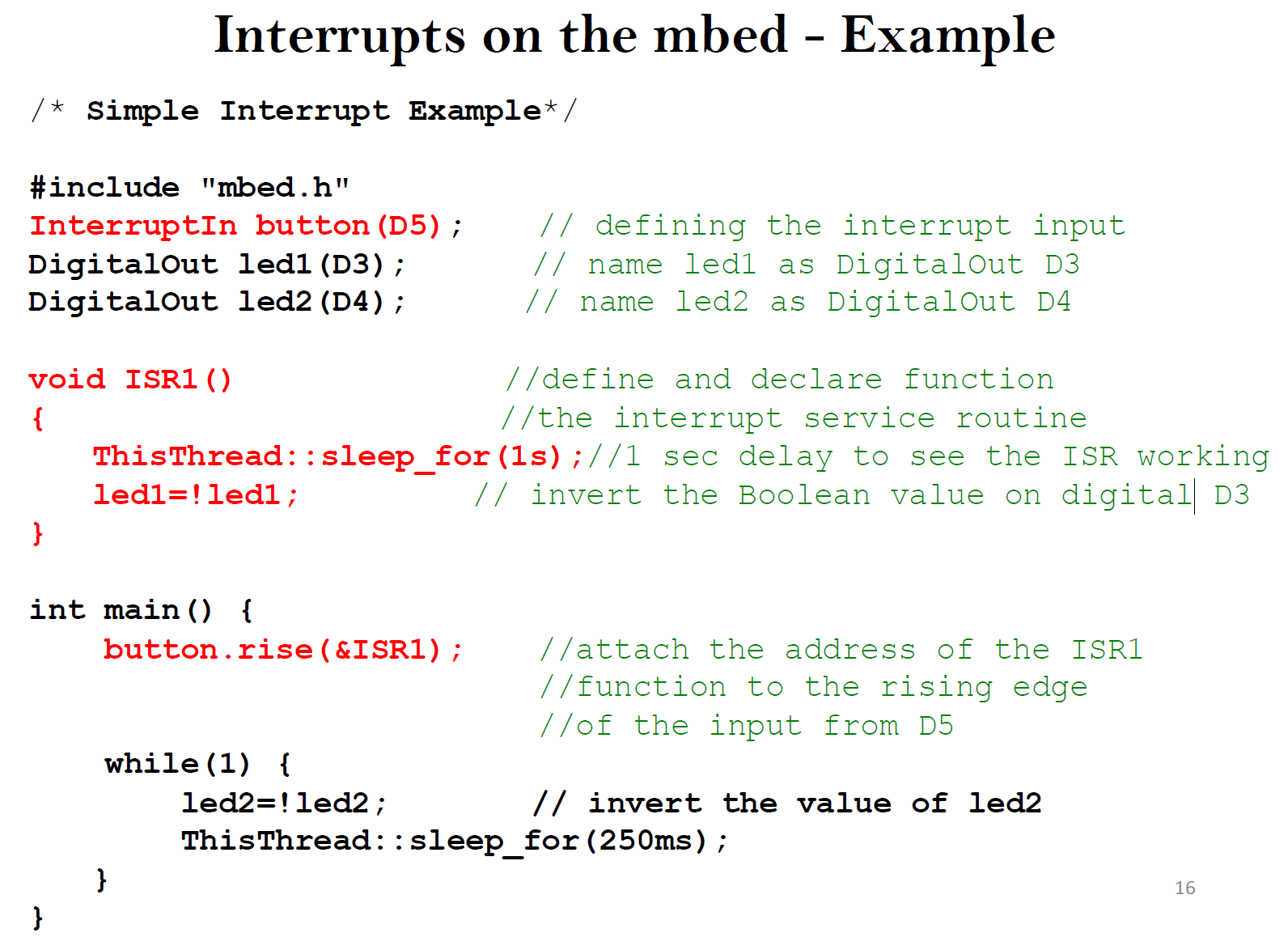
Mbed OS 6 上 GPIO 中断的 API
计时器(Timers/TIM)
什么是计时器
计时器是一个可以精准计量时间的外设。MCU 的时钟产生周期性的时钟信号,而 MCU 内部的寄存器在每次接收到时钟脉冲时都将计数+1,进而起到计时的效果。
当寄存器的值达到最大值时,再进行+1 操作时会发生数据溢出,数据回到 0
一般认为寄存器存储的是无符号整型数据,长度由寄存器位数决定。比如对一个 8 位的寄存器,最大的值就是 0xFF,数据溢出就会变成 0x00
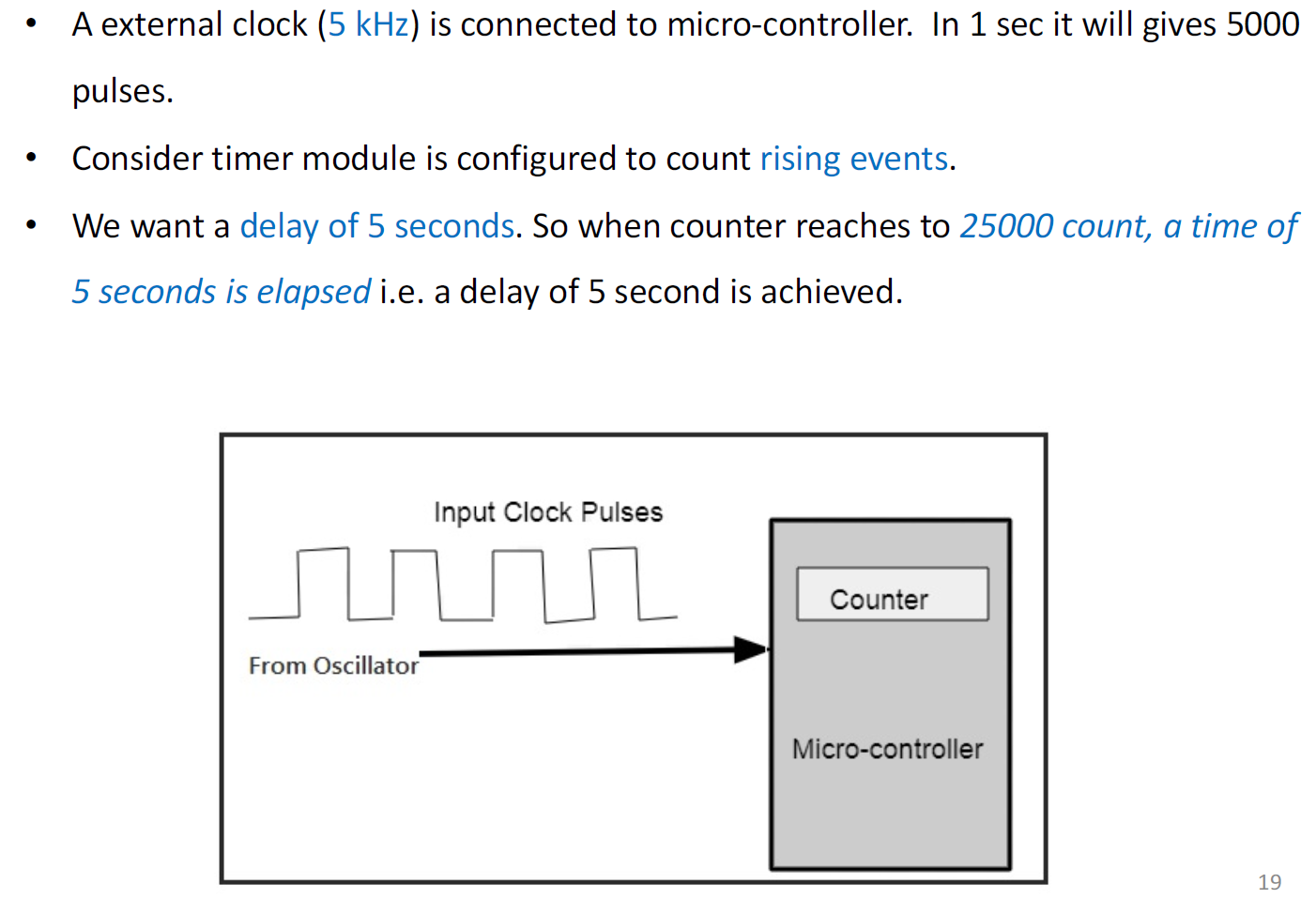
上图是个使用 TIM 的例子,其中的 TIM 采用上升沿计数的方式,外部时钟是 5kHz,想要获得 5s 的计时则需要计数 25000 次计数。
根据往年的题目,有理由怀疑这里删去了 Pre-scalar 的部分,可能也没提通过 TIM 生成 PWM 的与 Lecture 8 联动的内容
坚信没讲就是不考,亏了回头自学
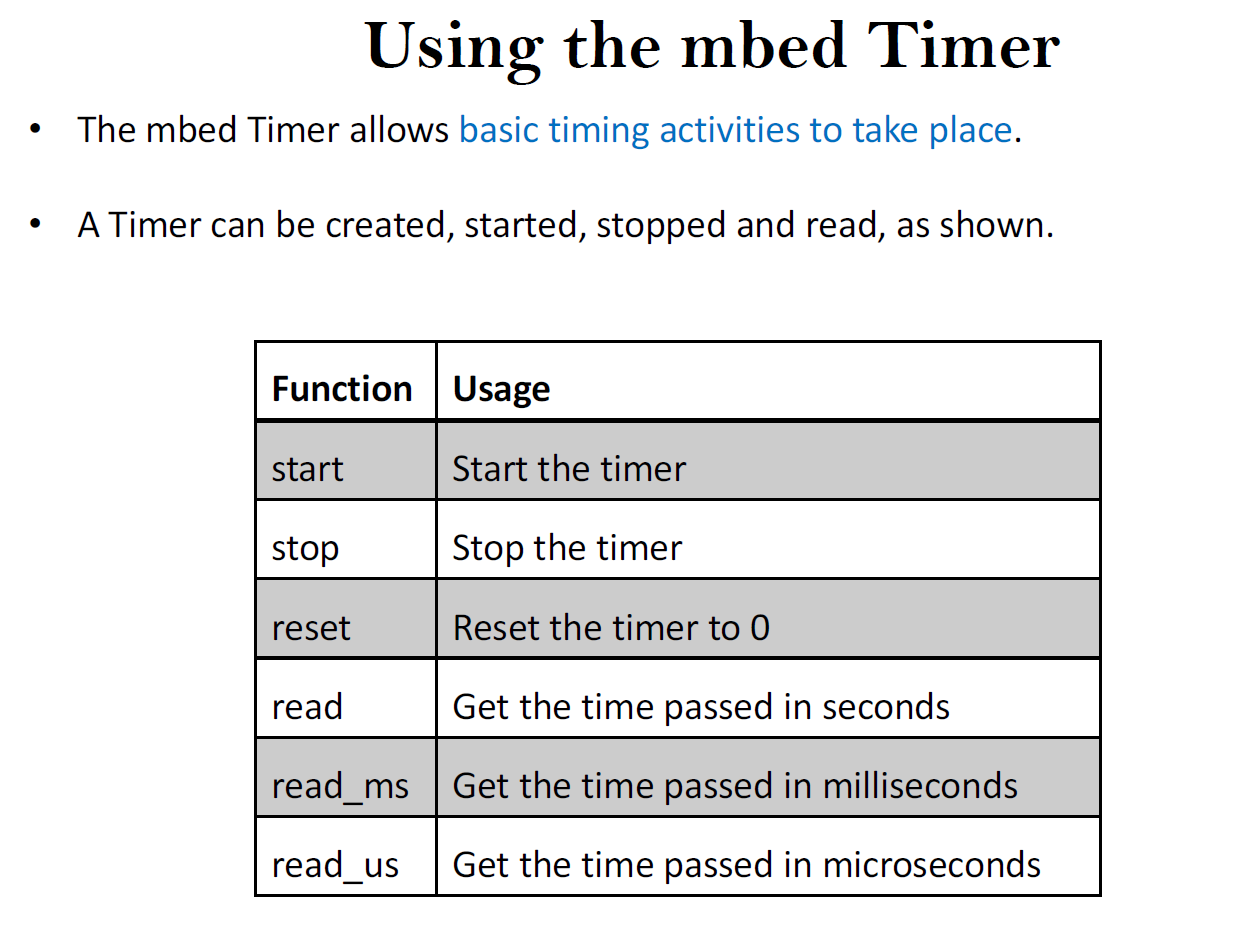
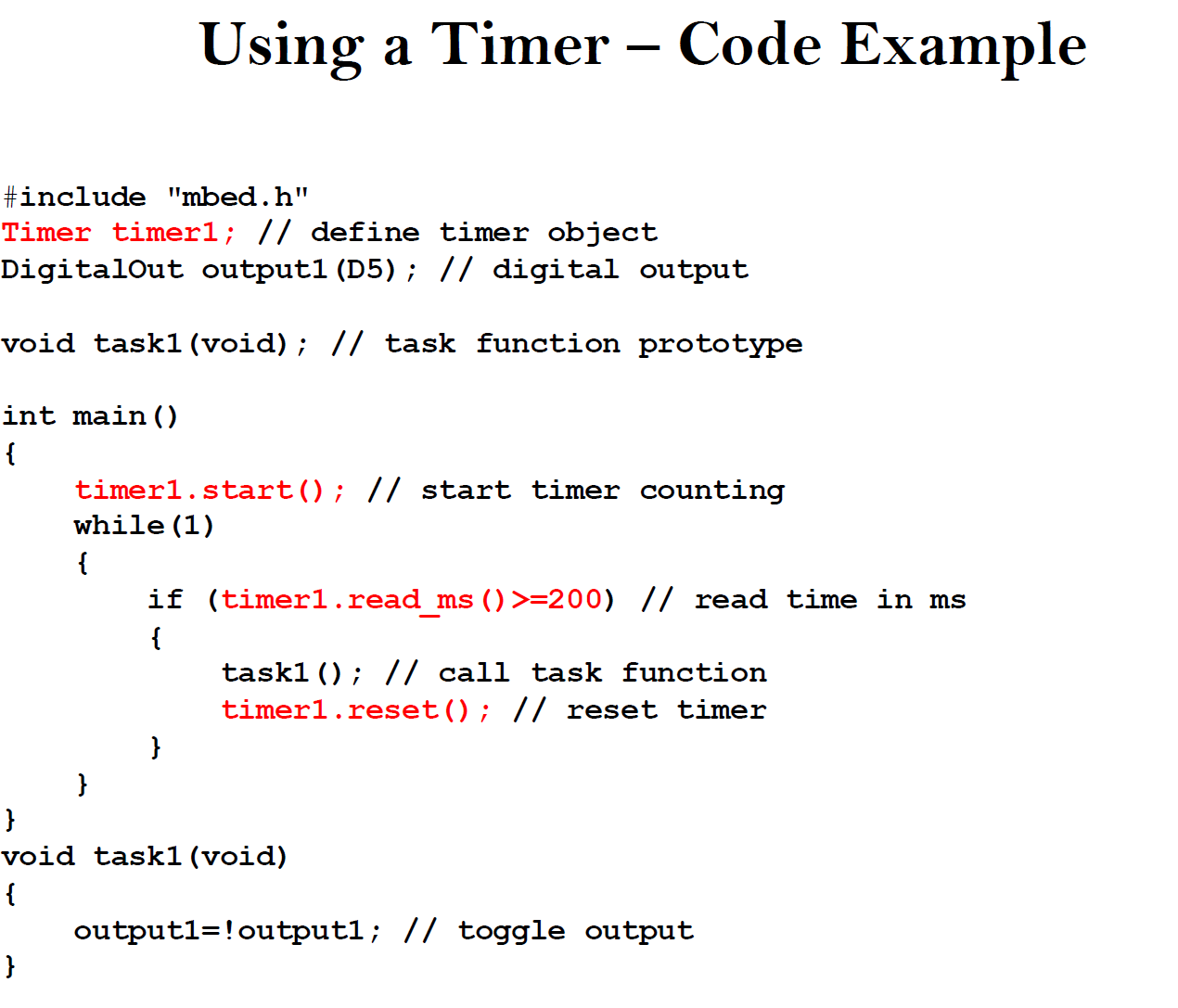
Mbed OS 6 的 Timer API
这里也没有讲 Ticker API,也就是 TIM 中断相关的内容
坚信不讲就是不考