Lecture 9 : Serial Communication and UART
明明 Lecture 9 在 Block 3 里面,为什么还要算在 Block 4 里考……
发布时间撞上 MS 复习讲座了 我打复习讲座……真的假的
设备间的通讯(Communication)
和人与人之间交流需要足够的语言能力类似,设备与设备之间需要相互交流也需要说相同的语言。说得更正式一点,就是他们也需要使用相同的通讯协议(Protocol)。
(PPT 原话)很幸运的是,我们只需要知道很少一部分的通讯协议就好。
人与人之间交流通过声音作为媒介,设备与设备之间的交流通过电信号作为媒介。通过导线把需要沟通的两个设备连接起来,设备便通过导线传播携带了信息的电信号。信息以位(bit)组成,每一位只包含两种状态,被我们表示为 0 和 1。
需要注意的是,0 和 1 和导线上的电平的对应关系需要根据具体的通讯协议来决定,比如 USB2.0 的 D+和 D-信号就是一组差分线,其 1 和 0 对应的电平状态并不简单的是高电平和低电平。
为什么我们需要快速的数据交互?
- 与其他的设备进行通讯,比如其他的 MCU,DSP,甚至是 FPGA(比如 SRIO,PCIe,I2C)
- 从用户读取输入,以及在显示设备上输出
- 与不同板子上的 MCU 进行通讯交互,以实现 MCU 组网的应用场景(比如 CAN 和 LIN)
值得注意的是,CAN 总线和 LIN 总线的典型应用场景是汽车
数据通讯的类型
并行和串行
通讯协议我们可以分为两种模式,串行通信(Serial Form)和并行通信(Parallel Form)。
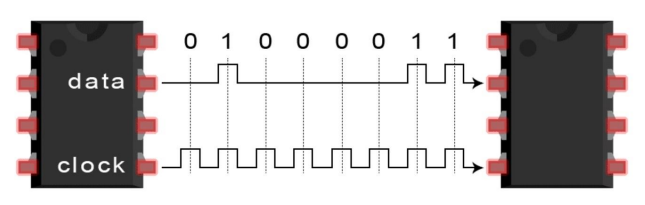
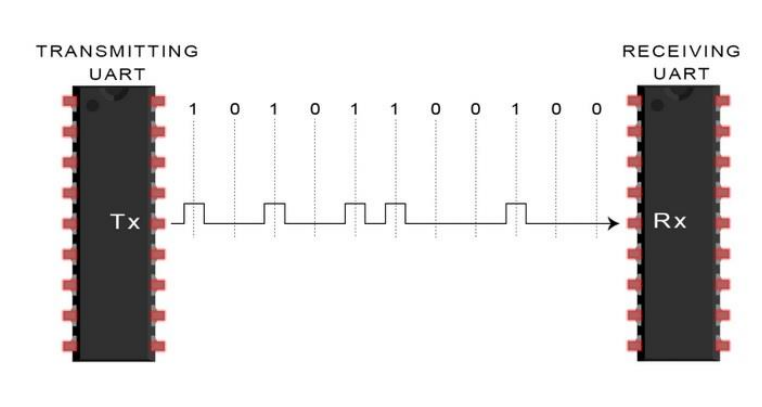
串行通信指的是这样的通讯方式:将数据一位一位的发送在同一条线上。
需要注意的是,虽然图上画了时钟线(也就是 clock),但是实际上串行通讯协议并不一定有时钟线。
- 在传输时,发送设备和接受设备之间使用正确的格式
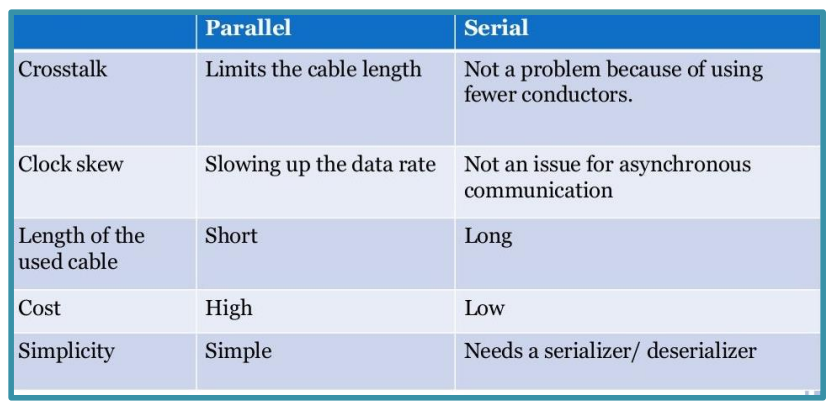
- 线少,所以便宜
- 使用更少的引脚数量,节省 MCU 的引脚
- 不用在意时钟偏移(Clock skew)问题(指的是对于不含时钟信号的异步串行数据传输)(好长一串定语,做 PPT 的怎么想的)
- 可以有更高的时钟速率,也就是有更高的传输速率
- 适用于长距离信号传输,甚至是网络信号传输
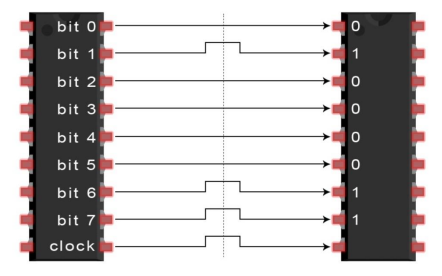
并行通信指的是这样的通讯方式:所有的数据位被同时发送在不同的线上,一一对应。
虽然图这么画,但是首先没有规定一定有 clock,也没有规定线的数量。
- 通常具有更高的速率
- 硬件实现更加简单,不需要序列化器(Serializer)和反序列化器(Deserializer),更易于实现
- 通常用于非常短距离的通讯
- 但是对于时序需要更高的要求,可能会发生时钟偏移(Clock skew),即时钟信号在不同的时间到达不同的设备
- 原因是线的长度、电容的耦合或者材料的不理想等
- 可以理解为信号不同时到达
- 有的时候,一条线上的信号会被临近线上的信号干扰,形成串扰(Crosstalk)
- 因为上两条的原因,在长距离时通讯速率相对串行通信较低
- 因为使用线的数量较多,线材成本更高
单工,半双工和全双工
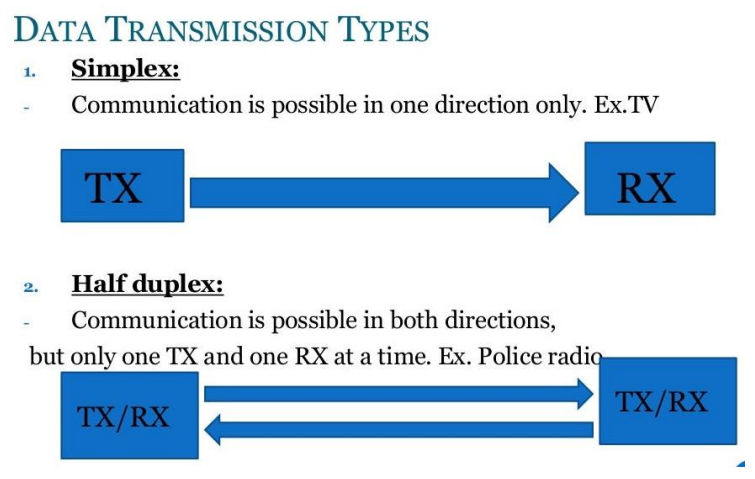
- 单工(Simplex): 只允许单向的数据通讯。对于一个设备,能且只能发送或者接受信息的其中一个功能
- 半双工(Half duplex): 允许双向的数据通讯,但是在某一个时刻,线上只能进行发送和接受信息的其中一个功能。对于一个设备,在相对长的时间里可以在线上发送和接收信息,但是在某一时刻只能实现一个功能。
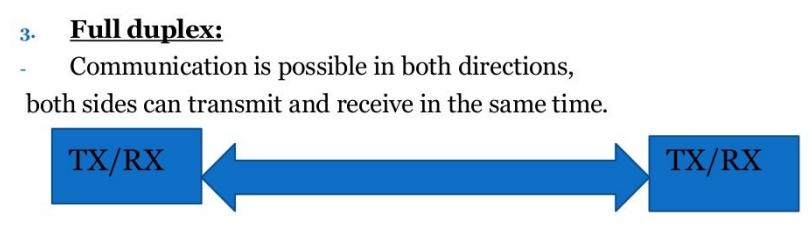
- 全双工(Full duplex): 允许任何时刻的双向数据传输。总线允许在同一时刻同时进行收发两个操作。
同步和异步
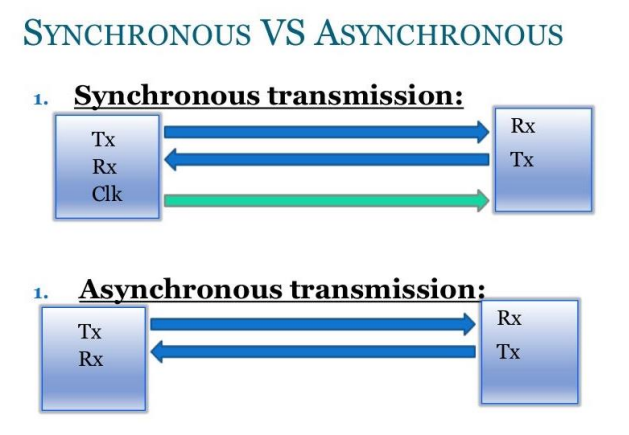
实际上图上画的就是 USART 和 UART,一个是同步传输协议,具有 Clk 线,另一个时异步传输协议。
同步通讯(Synchronous transmission)和异步通讯(Asynchronous transmission)的最大区别在于,同步通讯会发送时钟信号来同步主机和从机的时钟。
对于异步传输协议,通常会使用约定好的固定传输速率以及开始位和结束位来实现
总结:串行通信协议的基础
- 什么时候数据传输开始和结束(开始和结束条件)
- 通讯速率和数据打包格式
- 通讯速率可以通过事先约定或者提供时钟信号同步实现
- 数据打包格式根据不同的通讯协议而不同
UART & USART
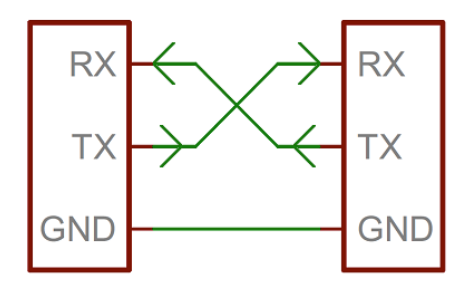
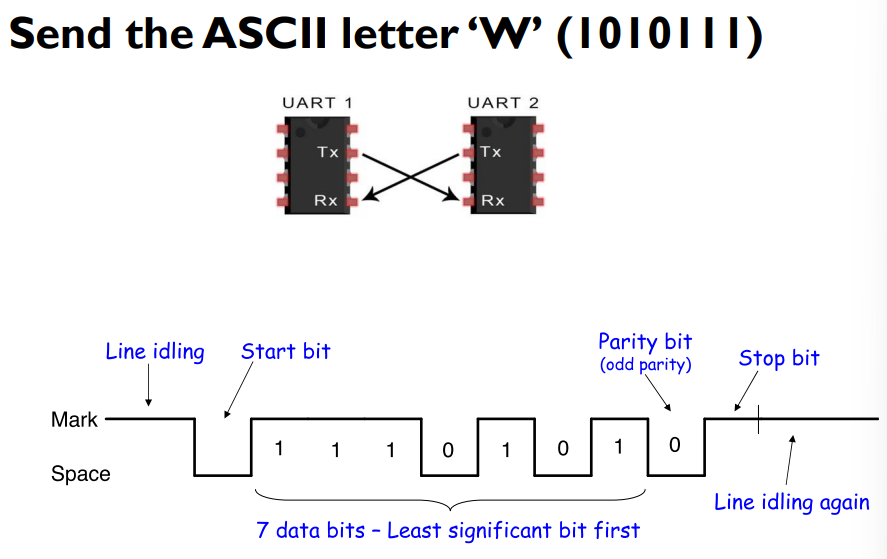
这是典型的UART连接,注意一下不是 USART。只需要两根线进行连线,RX 和 TX 交叉连接。
RX 接受信号,TX 发送信号,引脚没什么需要说的
UART 的简介
UART,全称为通用异步接收器/发送器(Universal Asynchronous Receiver/Transmitter)
它并不像 SPI 和 I2C 一样是一个通讯协议(指的是概念上的规则),而是一个在 MCU 中的物理意义上的电路,或者是一个独立的集成电路模块(指的是有物理实体)。
它是一个外设,有多种数据格式和数据传输速率可选。
UART 最主要的设计目的就是传输串行信号,适用于一对一的设备连接。在通过 UART 传输前,并行的信号会被处理成串行的信号以进行数据传输。
UART 是一个典型的全双工通讯协议,一个设备可以同时发送和接收数据。
UART 的适用场景
- 并不需要很高的传输速率
- 较低的使用成本
- 每一个传输方向只需要一根线
- 硬件实现非常简单
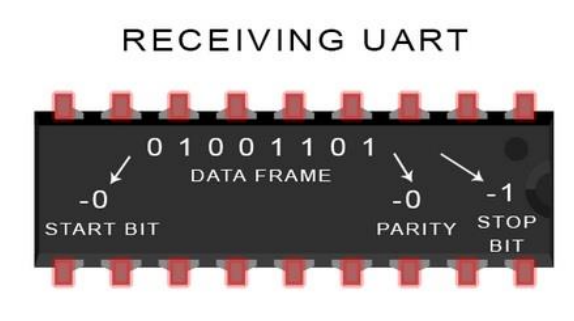
UART 的数据包(Packet)*
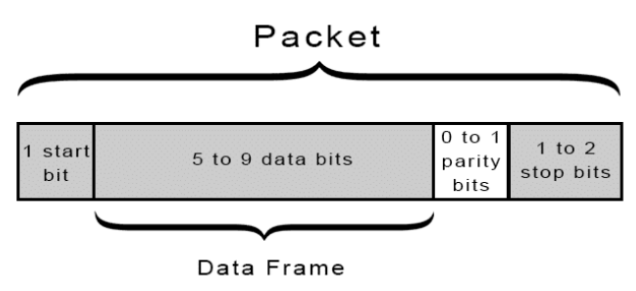
UART 的传输协议中,一个一字节的数据被打包成了数据包进行传输,具体的组成部分是:
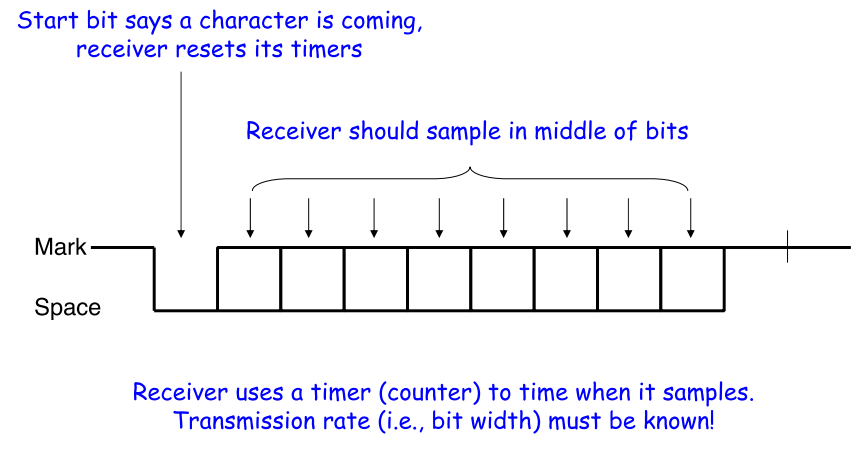
- 起始位
- 在没有进行数据传输的时候,连线默认置于高电平
- 数据的起始位由一个低电平的 0 开始,长度是一个时钟周期
- 接收的设备读到起始位后开始读取后面数据
- 数据帧(通常为 7 到 8 位,也有时候是 5 位)
- 在存在校验位的情况下,一个数据帧的范围是 5 到 8 位;如果不存在校验位,则最多能有 9 位
- 在大多数情况下,数据先以最小有效位数发送
- 从 LSB 到 MSB
- 一个可选的数据校验位
- 数据校验位的作用是让读取方确认数据在传输过程中是否发生错误
- 如果前面发送的 1 的位数是奇数,则数据校验位为 1,反之为 0。
- 可以更直接地理解为数据校验位让整个数据包的 1 的个数是偶数。·读取方如果读取了及数个 1,则说明数据传输错误
- 停止位(可以是一位或者多位)
- 标示着数据包的结束
- 从低电平上升至高电平,保持至少两个时钟周期
- 特定的每一位的时间(称为波特(baud))
- 传输速率我们也叫做波特率,单位是 bps(bit per second)
- 发送和接收端应该具有相同的波特率,误差最多 10%,不然可能会因为时间的误差导致传输失败
对于 UART 硬件,它们都以一定的时钟频率控制,通常是比特率(bit rate)的八倍
接受的设备会在每个时钟信号的脉冲进行采样,等待起始位的发生。
UART 传输的过程
- 接受并行数据
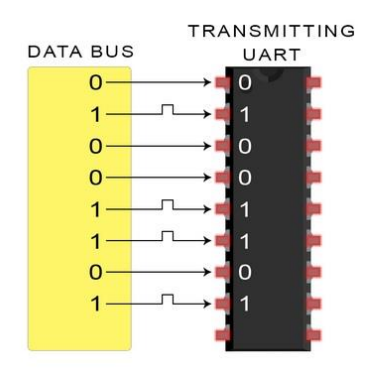
- 将并行数据串行化,并在数据帧上添加起始位、校验位和停止位
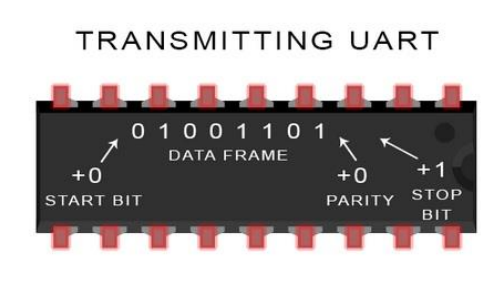
- 通过 Tx 引脚串行的向外输出打包好的数据包,其中数据包的格式和波特率被预先设置好且与接收设备保持一致
- 接收设备读取到起始位后开始读取数据包,并处理得到数据帧
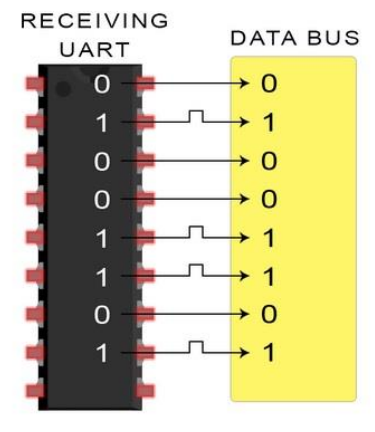
- 将读取到的数据帧并行化并输出给总线(也就是留给 MCU 处理)
数据传输出现错误
成帧错误(Framing Error)
- 接收方找不到规定的起始位和停止位
- 起始位是一个数据包的开头,也是数据包中其他的位的参考
- 当应当出现停止位时未能出现停止位时,就会发生成帧错误
奇偶校验错误(Parity Error)
- 当数据包中的总的 1 的个数为奇数时,或者说是奇偶校验位和其之前的数据不符时,奇偶校验错误就会发生
- 奇偶校验位时可选项,所以这个错误在不使用奇偶校验位时不会发生
USART 的简介
USART,即为通用同步异步接收器/发送器(Universal Synchronous Asynchronous Receiver/Transmitter)。UART 只支持异步模式进行数据发送,线上不传输时钟信号;USART同时支持同步模式和异步模式。
换句话说,USART 可以被认为是 UART 的升级版,你可以用 USART 模块替代 UART 模块。
当你使用 USART 的同步模式时,需要多连接一条时钟信号线,同时不需要使用起始位和停止位了。这提升了数据传输效率,因为压缩了数据包的大小。
以下是 PPT 提供的基于 STM32F103 的 USART 例程:
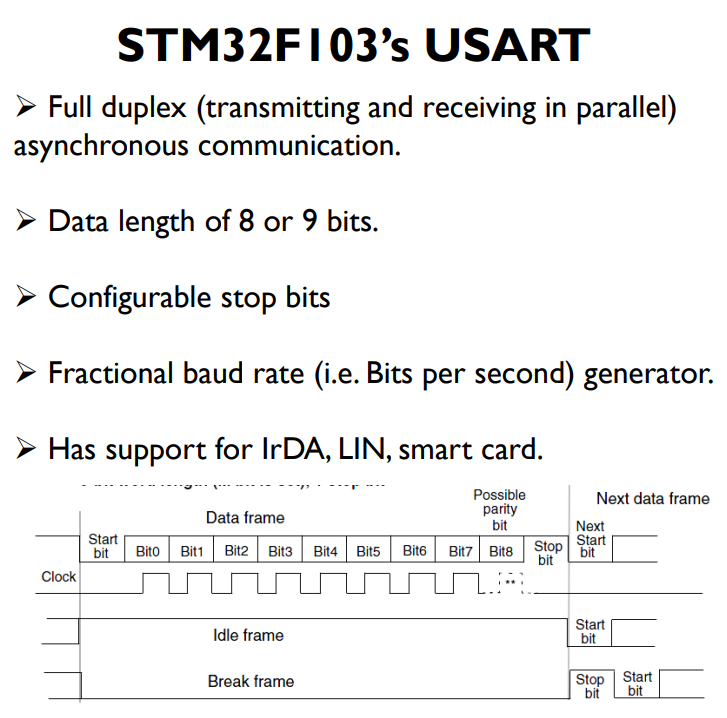
- 全双工工作模式,发送和接受在并行的两条线上
- 数据帧长度可以是 8 位(有奇偶校验位)或者 9 位(没有奇偶校验位)
- 可以配置的终止位
- 可以通过时钟信号自定义波特率
- 支持 IrDA(一种红外线通讯协议),LIN(前文提及),智能卡
图中的空闲帧(Idle frame)和间隔帧(Break frame,中文翻译不确定是否正确)是在 USART 的同步模式中特有的帧格式,用于实现 USART 功能,没细讲就是不考。