Lecture 10 : Serial Peripheral Interface (SPI)
仍然是 Microelectronic System 里讲过的
点击这里查看 Microelectronic System 复习 : SPI
SPI 的具体传输细节在那里讲的很清晰里,这里简单提及,不再细述
概述
SPI 是一种同步通讯协议,在 1980 年代由摩托罗拉(Motorola)开发,主要用于微控制器和各种外设之间的高速数据传输。SPI 的设计目标是实现高速、全双工的通信,适用于嵌入式系统中的各种应用。
SPI 协议遵从主从架构,主设备负责发起通信并控制数据传输,而从设备则响应主设备的请求。一路 SPI 总线上通常有一个主设备和一个或多个从设备,主设备在同一时间内只有一个处于活动状态。
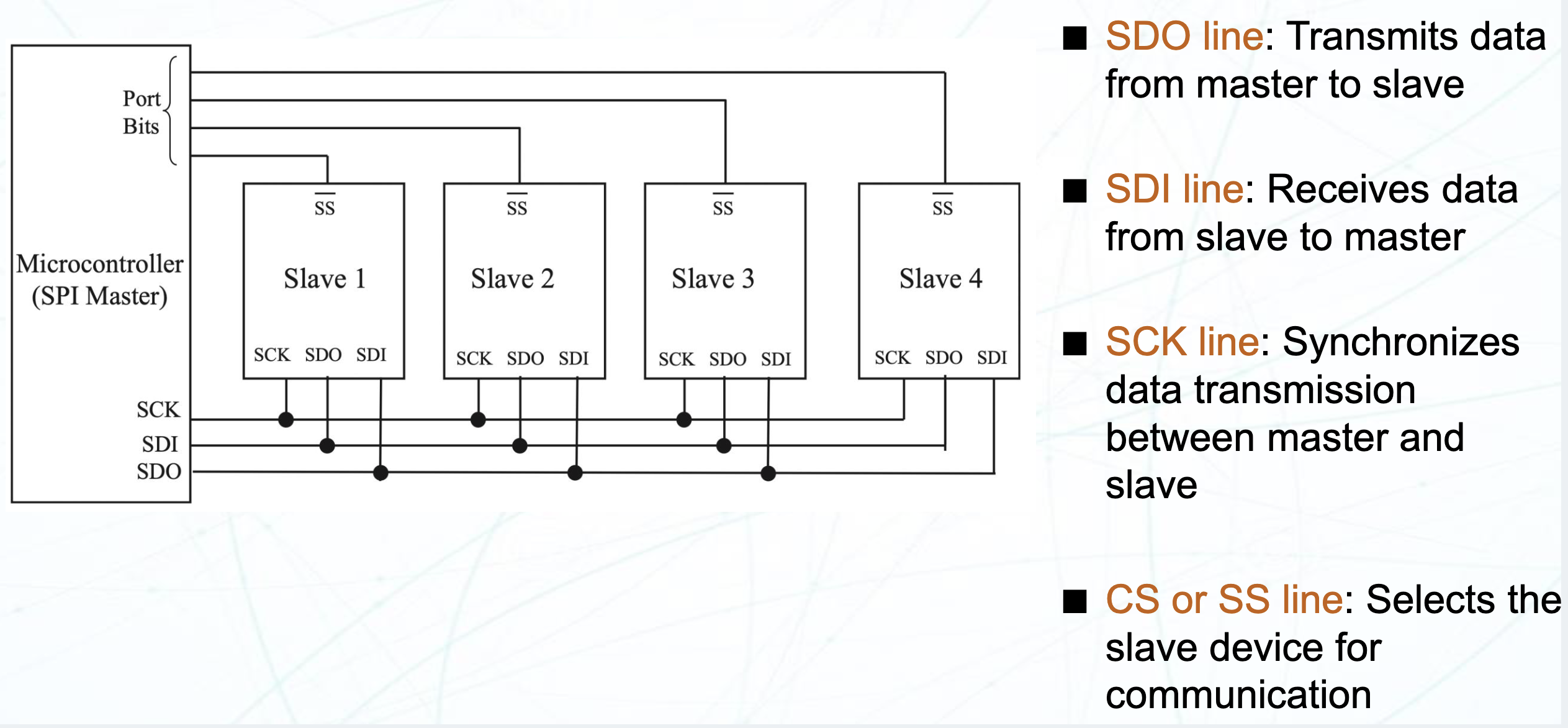
典型的 SPI 实现一共有四根线:
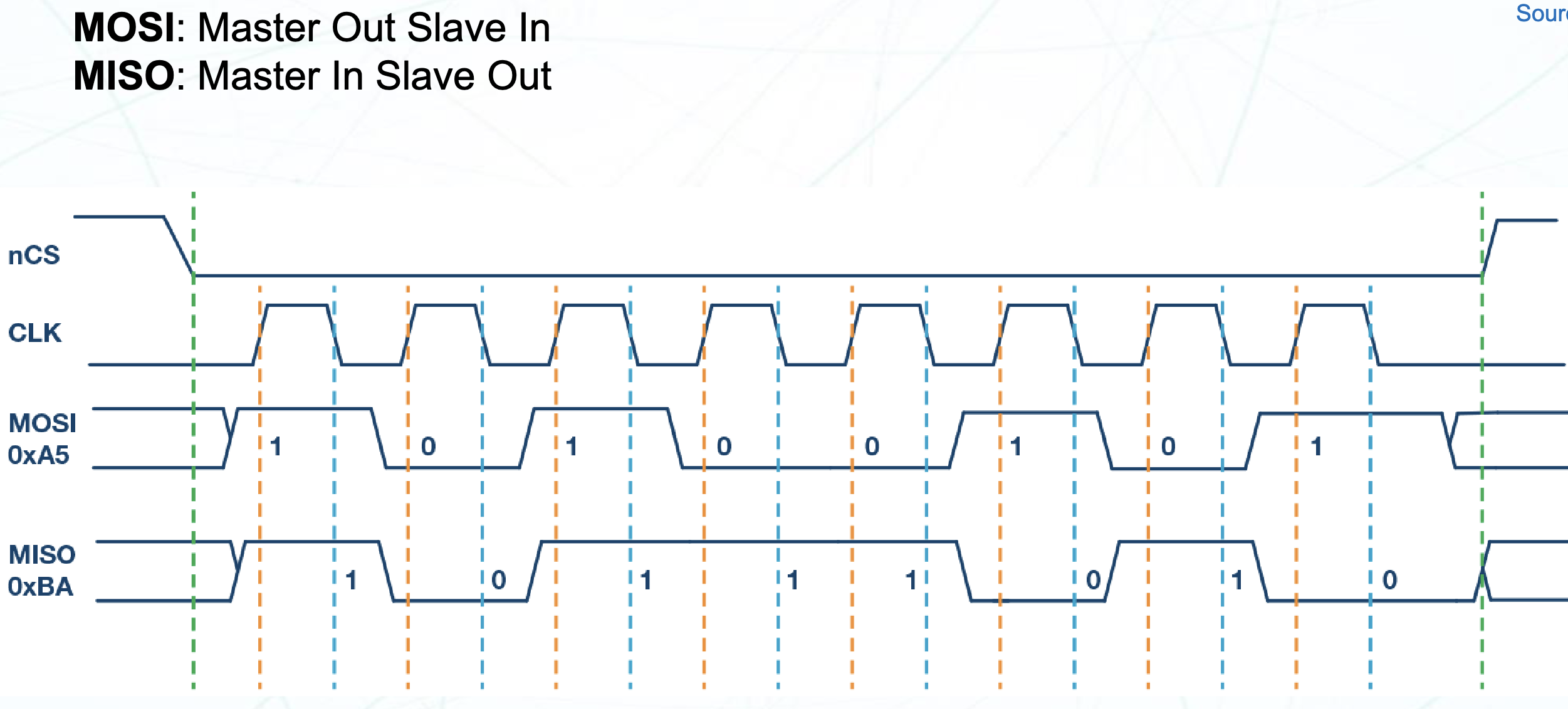
- MOSI(Master Out Slave In):主设备发送数据到从设备的线
- MISO(Master In Slave Out):从设备发送数据到主设备的线
- SCLK(Serial Clock):主设备生成的时钟信号线
- CS/SS(Chip Select/Slave Select):主设备选择要与之通信的从设备的线
这是典型的全双工 SPI 的四线连接,对于别的场景可能会有所不同。 对于半双工的 SPI 连接,MOSI 和 MISO 可以共用一根线。对于只发送和只接收的 SPI 设备,可以只使用 MOSI 或 MISO 线。对于多主机的 SPI 连接,CS/SS 线可以是多路复用的。
传输
SPI 适合高速数据传输,通常在几 Mbps 到几十 Mbps 的范围内。SPI 的速度取决于主设备的时钟频率和从设备的响应能力。SPI 的传输速率通常比 I2C 快得多,因此适用于需要高速数据传输的应用场景。因为不用像 I2C 一样传输地址然后等待 ACK,所以 SPI 的传输延迟也更低。同时,全双工的特性让 SPI 可以同时发送和接收数据,进一步提高了传输效率。
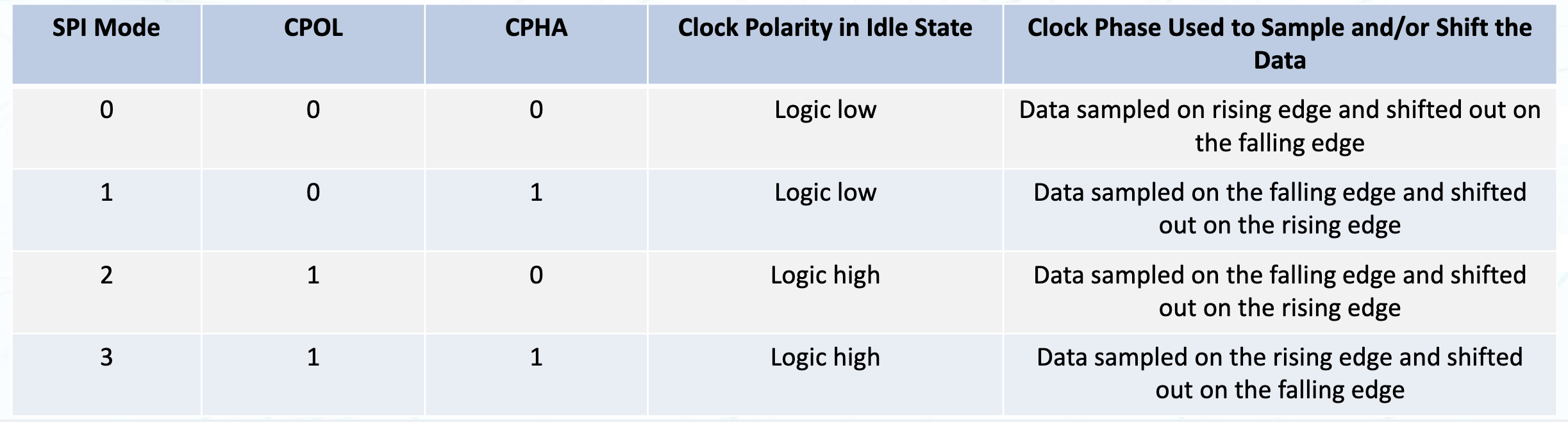
对于 SPI 传输,需要注意 SCLK 时钟的参数,具体而言是指 CPOL(Clock Polarity)和 CPHA(Clock Phase)两个参数。CPOL 决定了时钟线在空闲的情况下的电平高低,CPHA 决定了设备在时钟的上升沿还是下降沿进行数据读取以及发送。你在实际使用中使用什么样的参数,往往由你选择的设备的数据手册决定。
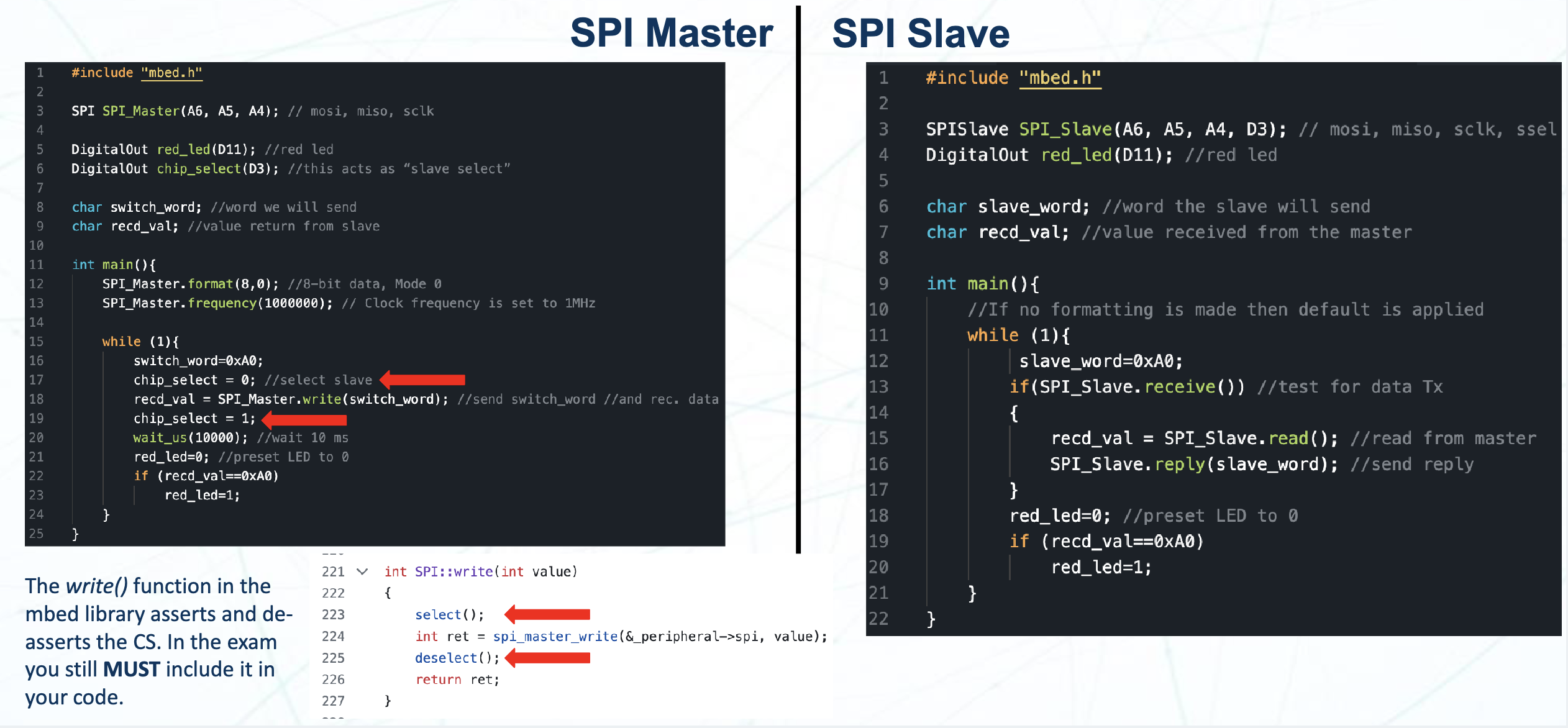
MBed OS 中的 SPI
SPI 主机
API 介绍来自 MBed OS 的官方文档
SPI(PinName mosi, PinName miso, PinName sclk, PinName cs): 构造函数,创建一个 SPI 对象mosi: 主设备输出线miso: 主设备输入线sclk: 主设备时钟线cs: 主设备片选线,可选参数,默认为NC(不连接)
void format(int bits, int mode): 设置 SPI 的数据格式和时钟模式bits: 数据位数,通常为 8 或 16 位mode: 时钟模式,取值范围为 0 到 3,对应于 CPOL 和 CPHA 的组合
void frequency(int hz): 设置 SPI 的时钟频率hz: 时钟频率,单位为赫兹- 默认参数是 1MHz
int write(const char *tx_buffer, int tx_length, char *rx_buffer, int rx_length): 发送和接收数据tx_buffer: 发送缓冲区tx_length: 发送数据的长度rx_buffer: 接收缓冲区rx_length: 接收数据的长度- 总共进行交互的字节数量是
tx_length和rx_length的最大值。超出部分的字节输出补全默认值
void set_default_write_value(int value): 设置默认的写入值value: 默认写入值,通常为 0xFF- 有的 SPI 设备在没有数据传输的时候会发送一些数据,这个函数可以设置默认的写入值
样例程序 (来自 MBed OS 6: SPI)
/*
* Copyright (c) 2006-2020 Arm Limited and affiliates.
* SPDX-License-Identifier: Apache-2.0
*/
#include "mbed.h"
SPI spi(D11, D12, D13); // mosi, miso, sclk
DigitalOut cs(D0);
int main()
{
// Chip must be deselected
cs = 1;
// Setup the spi for 8 bit data, high steady state clock,
// second edge capture, with a 1MHz clock rate
spi.format(8, 3);
spi.frequency(1000000);
// Select the device by seting chip select low
cs = 0;
// Send 0x8f, the command to read the WHOAMI register
spi.write(0x8F);
// Send a dummy byte to receive the contents of the WHOAMI register
int whoami = spi.write(0x00);
printf("WHOAMI register = 0x%X\n", whoami);
// Deselect the device
cs = 1;
}SPI 从机
SPISlave(PinName mosi, PinName miso, PinName sclk, PinName cs): 构造函数,创建一个 SPI 从机对象mosi: 从设备输入线miso: 从设备输出线sclk: 从设备时钟线cs: 从设备片选线,可选参数,默认为NC(不连接)
void format(int bits, int mode): 设置 SPI 的数据格式和时钟模式bits: 数据位数,通常为 8 或 16 位mode: 时钟模式,取值范围为 0 到 3,对应于 CPOL 和 CPHA 的组合
void frequency(int hz): 设置 SPI 的时钟频率hz: 时钟频率,单位为赫兹,默认参数是 1MHz
int receive(): 查看是否有数据可读- 返回值
0: 没有数据可读1: 有数据可读
- 返回值
int read(): 读取数据- 返回值
- 读取到的数据
- 返回值
void reply(int value): 回复数据value: 要回复的数据
样例程序 (来自 MBed OS 6: SPI Slave)
/*
* Copyright (c) 2006-2020 Arm Limited and affiliates.
* SPDX-License-Identifier: Apache-2.0
*/
#include "mbed.h"
SPISlave device(D12, D11, D13, D10); // mosi, miso, sclk, ssel
int main()
{
device.reply(0x00); // Prime SPI with first reply
while (1) {
if (device.receive()) {
int v = device.read(); // Read byte from master
v = (v + 1) % 0x100; // Add one to it, modulo 256
device.reply(v); // Make this the next reply
}
}
}
使用 SPI 驱动 ADXL345
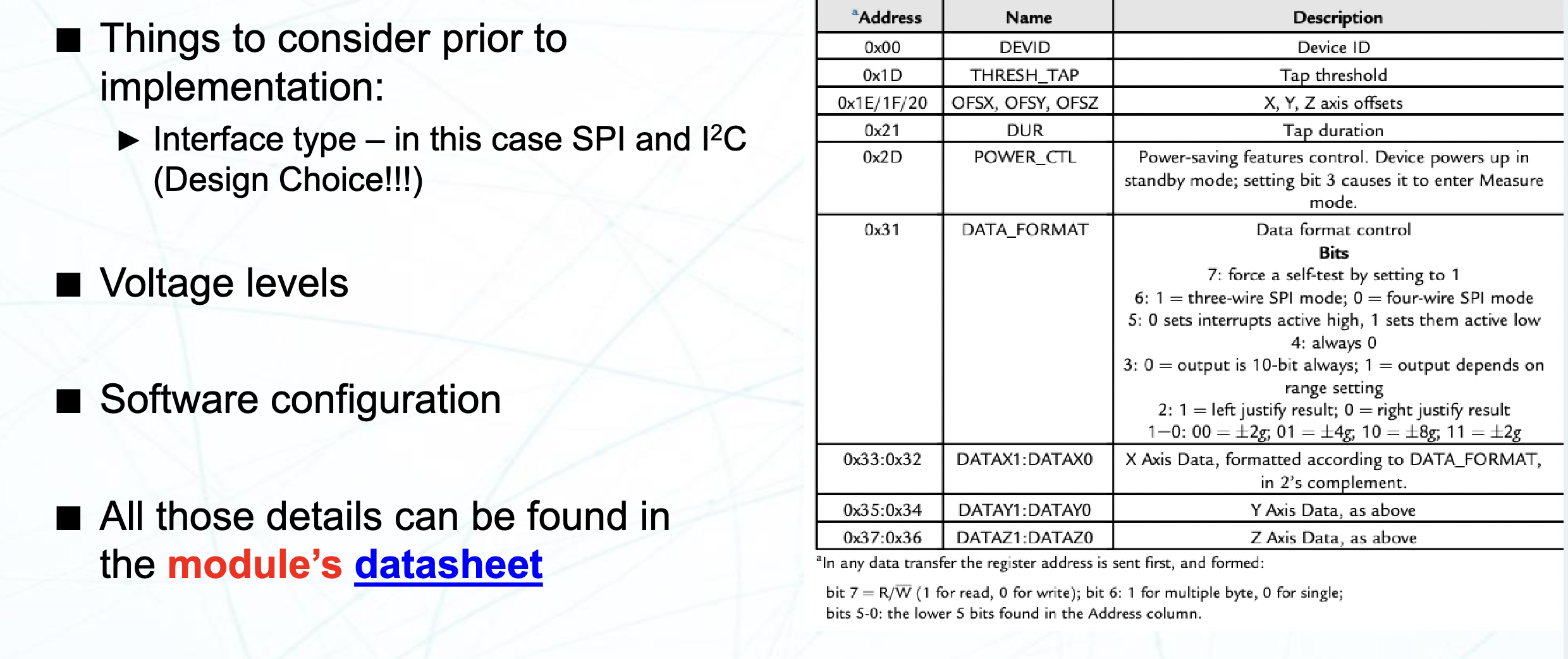
ADXL345 是一款三轴加速度计,支持 SPI 和 I2C 通讯。我们使用 SPI 来驱动它。
查看 ADXL345 的数据手册,我们了解了它的驱动电压以及软件配置的细节。
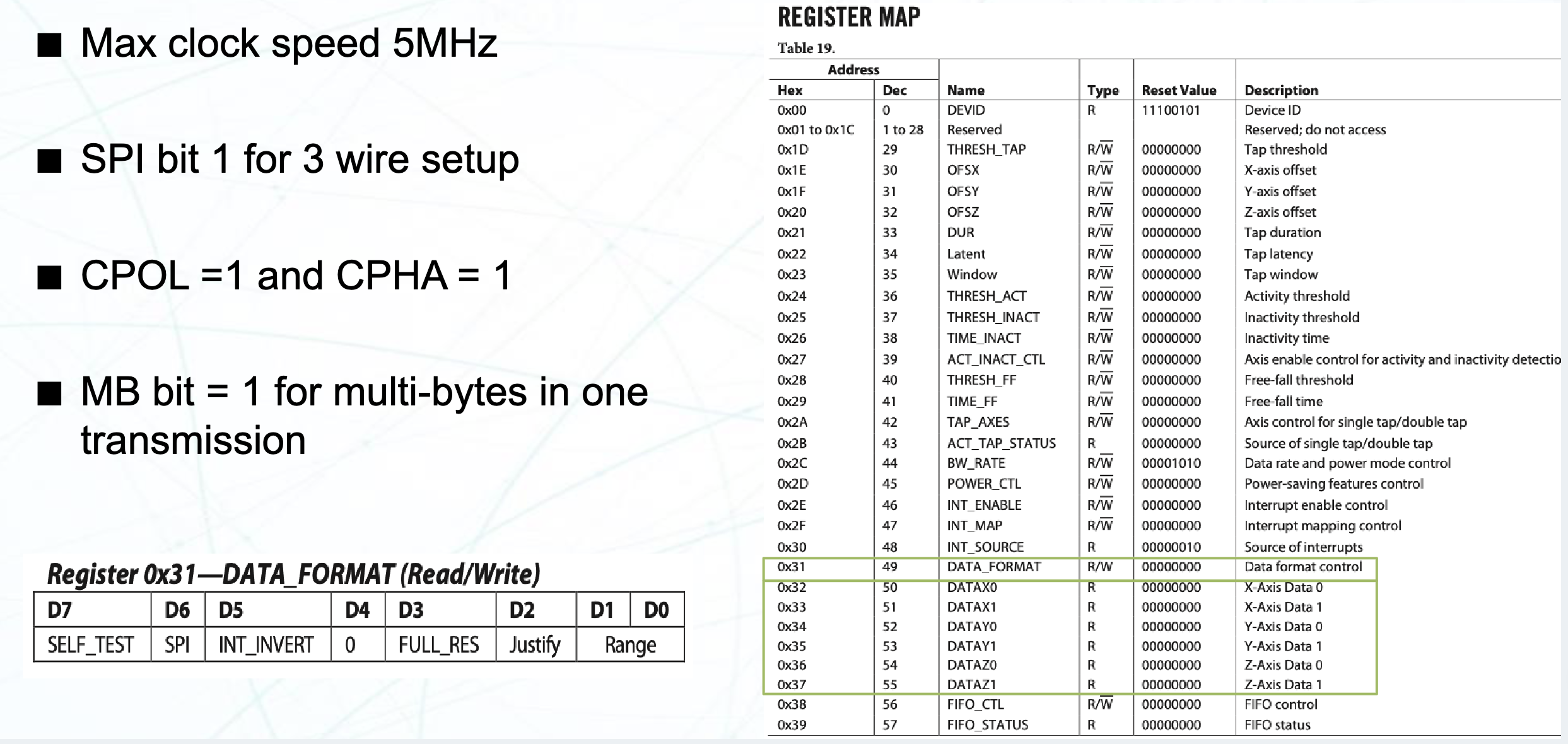
根据数据手册,SPI 的最大频率是 5MHz, CPOL 和 CPHA 都是 1,MB 位为 1 来启用单次多字节传输。
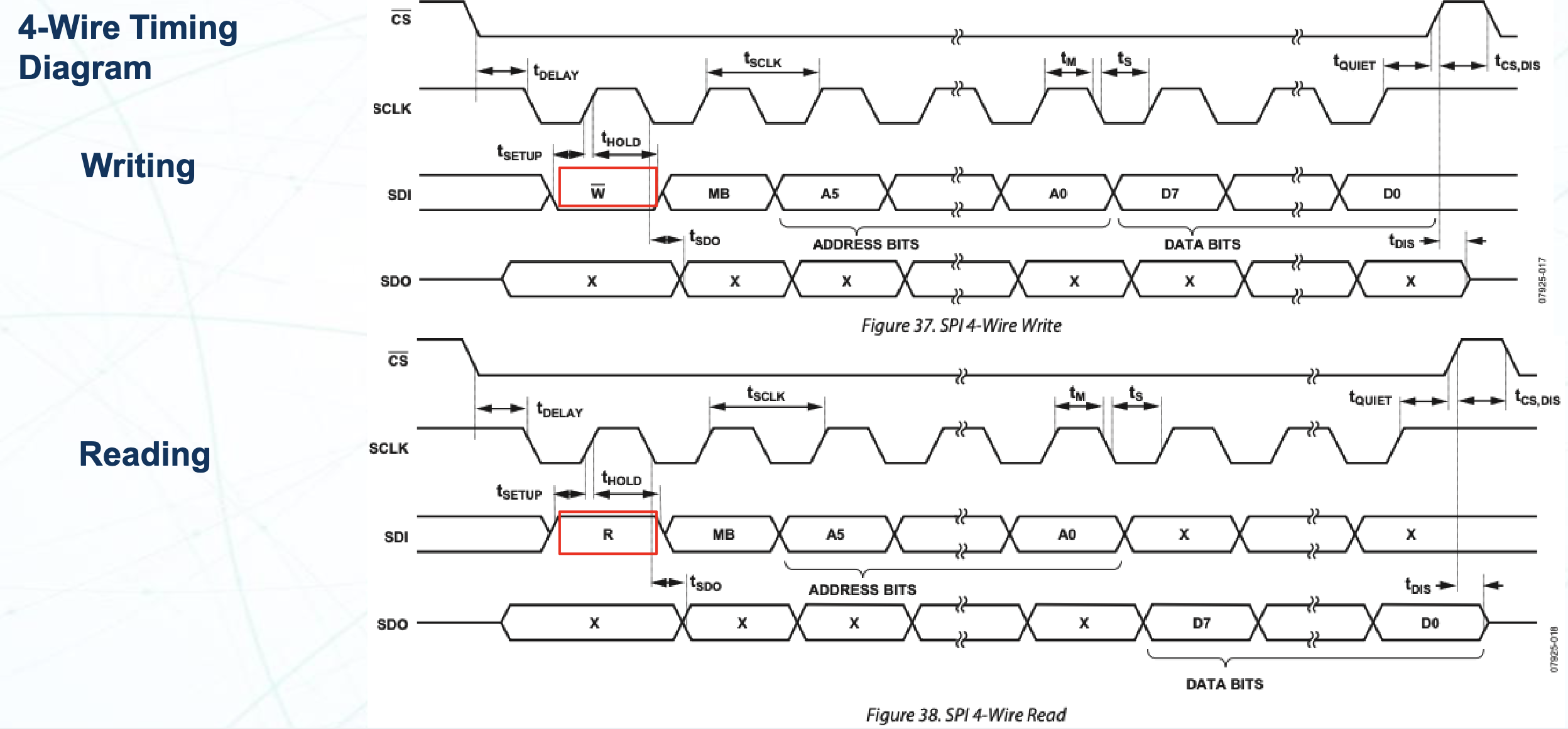
这是它的写入和读取的时序:
进而,我们可以得出,在 MBed OS 中,ADXL345 的驱动代码应该是这样的:
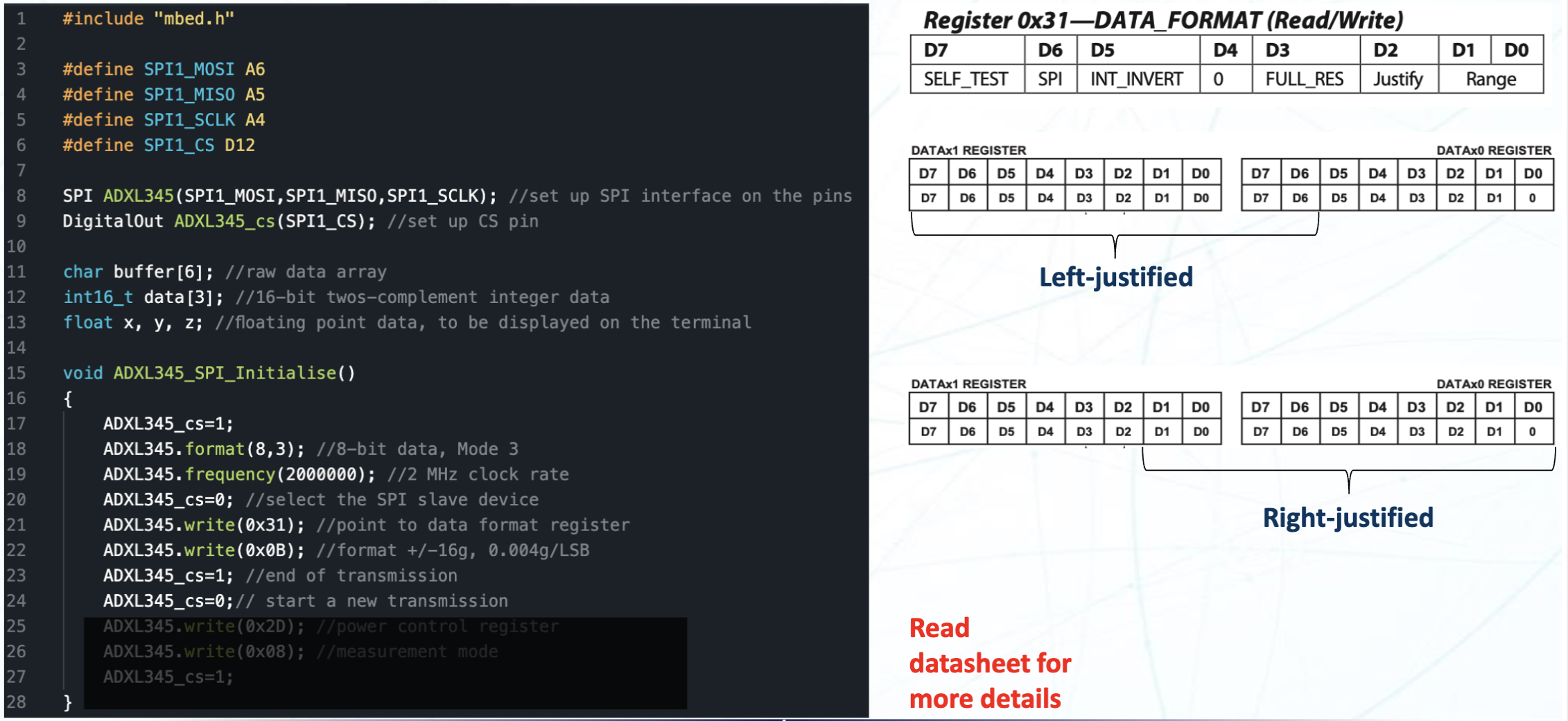

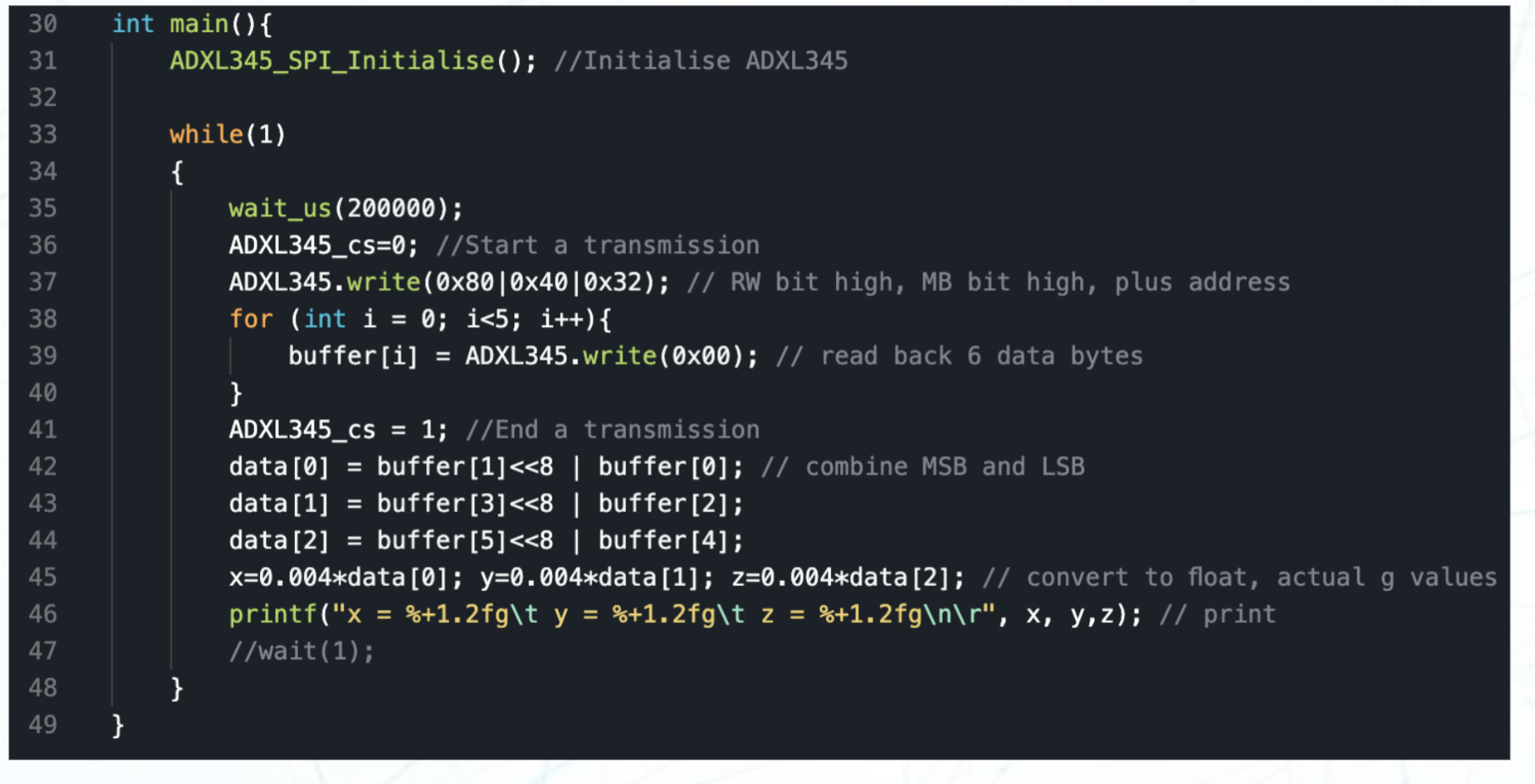
总的来说,寄存器配置和具体通信内容看 ADXL345 的数据手册,SPI 的具体实现看 MBed OS 的 API 文档。把二者结合起来来实现正常的外设通信。
这里就不继续抄数据手册的寄存器定义了